Behoben ab:
Bibliothek: L_MC1P_MotionControlBasic ab V03.23.00.159
Verhalten der neuen Version: Der Ruck des Bewegungsprofils wird jetzt erst aktiv, wenn die Startbeschleunigung eines vorausliegenden QSP-Application auf Null oder auf die neue Profilbeschleunigung reduziert wurde.
Damit tritt keine unerwartete Ausgleichsbewegung mehr auf.
________________________________________________________________________________________________________________________________________________________________________________________________________________________
Beschreibung des Verhaltens:
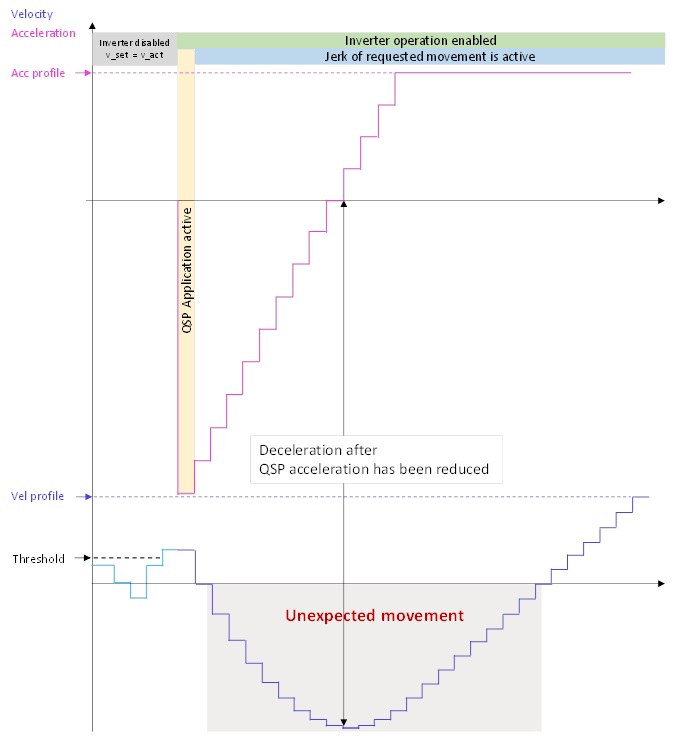
Beim Starten eines Bewegungsprofils mit reduziertem Ruck wird zunächst eine Ausgleichsbewegung mit unerwarteter Beschleunigung und entgegen der erwarteten Richtung ausgeführt.
Die erwarteten Profilparameter werden erst umgesetzt, wenn die Achse einmal bis auf v = 0 unit/s und acc = 0 unit/s² verzögert hat.
Ggf. kommt es zuvor zum Ansprechen von Überwachungen, wie z.B. Schleppfehler-, Bewegungsrichtung- oder Endlagen-Überwachungen.
Unter welchen Bedingungen tritt das Verhalten auf?- Mit Reglerfreigabe (xEnableOpration = FALSE/TRUE) liegt der Motorgeber-Drehzahlistwert über n_act = 5 rpm
- Das Bewegungsprofil wird sofort gestartet, solange noch eine QSP Verzögerung als Sollwert aktiv ist.
- Der parametrierte Ruck des QSP-Application und des Bewegungsprofils sind stark unterschiedlich.
Hintergrund:
Wird bei Reglerfreigabe eine Drehzahl > 5 rpm erkannt, dann wird die Achse zunächst mit den Parametern des QSP-Application in den Stillstand geführt.
Mit Start des Bewegungsprofils werden die aktuellen Werte für Geschwindigkeit und Verzögerung übernommen und die Profilgenerierung wird sofort mit den Parametern des Profils fortgesetzt.
Erfolgt der Start des Bewegungsprofils, bevor die QSP-Verzögerung wieder Null ist, dann muss die Verzögerung im Bewegungsprofil erst wieder reduziert werden. In dieser Zeit beschleunigt die Achse in Richtung der QSP-Verzögerung.
Die unten angefügten Diagramme skizzieren ein Beispiel, bei dem das Bewegungsprofil zum worst-case-Zeitpunkt gestartet wird: die Soll-Beschleunigung beträgt noch 100% der QSP-Verzögerung.
Betroffene Produkte:
Bibliothek: L_MC1P_MotionControl Basic (FAST Motion)
Die betroffene MotionAxis-Funktionalität ist unterlagerte Software-Komponente in allen FAST-TMs und i950-TAs.
Kurzfristige Maßnahmen:
Das Bewegungsprofil sollte erst verzögert nach der Reglerfreigabe gestartet werden, nachdem die Achse den Status xReadyForMotion = TRUE UND xStandstillSetVelocity = TRUE zurückmeldet.
In Anwendungen mit rein parametrierbaren i950 Technologie Applikationen stehen diese Stati nicht an der Feldbusschnittstelle zur Verfügung. In diesem Fall kann als Abhilfe folgendes umgesetzt werden:
- Die Logik PLC fordert zeitgleich mit der Reglerfreigabe auch einen QSP an.
Enable operation Bit 03 = TRUE UND Activate QSP Application Bit02 = TRUE - Wenn QSP active Bit 05 = TRUE, dann Activate QSP Application Bit02 = FALSE
- Das Bewegungsprofil kann getstartet warden, wenn QSP active Bit 05 = FALSE
Tipp:
In sehr vielen Anwendungen mit i950 Technologie-Applikationen reicht es aus, das Bewegungsprofil erst 1-2ms nach der Reglerfeigabe zu starten, damit das Verhalten nicht auftritt.
Oder man parametriert den Ruck des QSP-Application sehr ähnlich wie in den Bewegungsprofilen.
Bewertung/Empfehlungen:Der QSP Application wird unerwartet aktiv, weil eine Drehzahl erkannt wird, die eine interne -nicht vom Anwender festgelegte- Schwelle der Motordrehzahl überschritten hat.
Die Bewegung startet mit unerwartet hoher Beschleunigung entgegen der erwarteten Richtung und es können Geschwindigkeiten auftreten, die höher sind als im Bewegungsprofil eingestellt.
Das Verhalten kann zufällig im operativen Betrieb der Maschine auftreten und wird nicht zwingend bei der Inbetriebnahme entdeckt.
Die Dauer der unerwarteten Bewegung und die Drehzahl, die dabei erreicht wird, sind abhängig dem Verhältnis zwischen dem Ruck des QSP Application und dem des Bewegungsprofils.
Die auftretende Beschleunigung und der Ruck sind für die Mechanik zulässig, da sie vom Anwender für den Application QSP festgelegt wurden.
Überwachungen, wie z.B. Schleppfehler-, Bewegungsrichtung- oder Endlagen-Überwachungen werden in ihrer Funktion nicht eingeschränkt.
Auftretenswahrscheinlichkeit:
Die 5rpm-Schwelle kann typischerweise überschritten werden:
- Bei aktiven Lasten (Hubwerken, Hebern) und automatischer Steuerung der Haltebremse, aufgrund kleiner Ausgleichbewegungen bei der Lastübernahme.
- Bei Achsen mit austrudelnden oder durch externe Drehmomente bewegten Motoren.
Die typische Drehzahl-Schwankung bei der Auswertung von Resolvern im Stillstand liegt mit kleiner 2 rpm deutlich unter der 5rpm-Schwelle.
Oft wird das Bewegungsprofil erst verzögert nach Reglerfreigabe gestartet, dann wird keine unerwartete QSP-Verzögerung mehr als Startwert übernommen.
Wird eine Bewegung ohne Profilgenerator wie z.B. über einen Positions- oder Drehzahlfolger oder ein Drehmomentfolger (Winder Tension) angefordert, dann tritt das Verhalten nicht auf.
Die betroffene MotionAxis Funktionalität L_MC1P_MotionControl Basic wird so seit mehr als 8 Jahren in Feldanwendungen eingesetzt. Beobachtet wurde das Verhalten bislang nur in zwei Anwendungen mit i950:
- 1x TA SpeedControl
- 1 x Programmierbare TA